

Full Workshop 8


Description
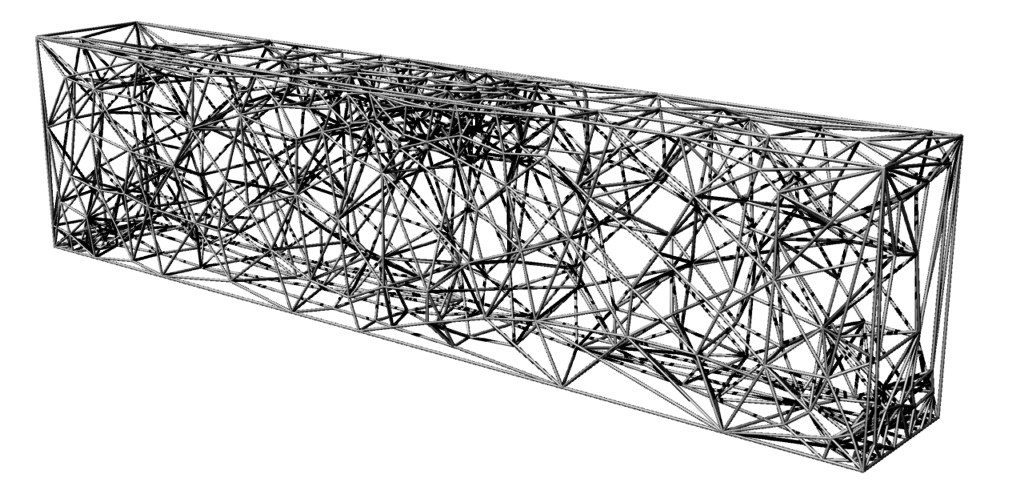
Mechano-Adaptive Space Frame Structures are inspired by the efficiency of bones, which utilise local responses to the mechanical environment to produce globally strong, yet lightweight structures. This strategy is very different from the way structures are designed and fabricated in traditional architecture and construction, where standardisation of components, nodes and geometry takes priority over material and structural efficiency.
As part of a PhD collaboration between Foster + Partners and the Royal Veterinary College, an algorithm was developed to generate these structures simulating the anisotropy of trabecular bones simulated using ellipsoids aligned to the principle stress directions. In tandem, a novel manufacturing technique was developed to materialise these geometries combining a bespoke spatial extrusion tool with a compliant 7-axis robotic arm.
The robot movement and extrusion are controlled live using software developed in-house, allowing to adjust the tool path on the fly and compensate for inaccuracies in the print.
Instructors
Jan Dierckx (Foster + Partners, Associate), Alessandro Felder (Royal Veterinary College, Ph.D. Student), Richard Maddock (Foster + Partners, Associate), Giannis Nikas (Foster + Partners, Architect and Environmental Design Analyst)
Learning goals
The primary goal of the workshop is to introduce the participants to the power of a recursive loop between design, analysis and manufacturing.
Enabled by a powerful combination of tools, they will learn how to integrate construction, feasibility and performance into their designs.
The results will inform the strategies required to spatially 3D print the most performant structures which will be monitored and tested using the torque sensitivity of the robot arm to compare predicted to actual performance, in turn re-informing and reinforcing the next iteration of the design.
Requirements
No specific knowledge required
Duration
3 days
Number of participants
12