

Workshops
Pre-workshop 1
Collaborative Robotic Architectural Fabrication
BOOKED OUT!
Instructors:
Ayoub Lharchi (Centre for Information Technology and Architecture | KADK)
Yen-Cheng Lu (FibR)
Bahar Al Bahar (RoboCraft)
Jingcheng Chen (Design-to-Production)
Description:
The idea of this workshop is to introduce the participants to collaborative frameworks where different robotic types (industrial robotic arm, UAV, wheeled robots and cable driven robots etc.) are used,… Read more >>
Pre-workshop 2

Instructors:
Thibault Schwarz (HAL Robotics Ltd.)
Tristan Gobin (HAL Robotics Ltd.)
Sebastian Andraos (HAL Robotics Ltd.)
Description:
This workshop is proposed as a masterclass for the new HAL Robotics Framework (due for release Sept. ’17). It will be software-based and teach participants to effectively use the framework, supported by on-the-spot assistance. By the end, participants will be able to setup robot cells with custom tooling and calibration,…Read more >>
Pre-workshop 3

Instructors:
Florian Frank (blickfeld7)
Yu-Ting Sheng (Feng Chia University)
Shih-Yuan Wang (Robotic Plus)
Description:
This workshop will introduce participants to the concepts and features of TACO ABB. The workshop will focus on the programming, simulation and control of ABB industrial robots directly with Grasshopper. By the use of different offline and online programming techniques as well as “live” interaction with the robot movement and IOs, the participants will…Read more >>
Pre-workshop 4
Instructors:
Gonzalo Casas (Gramazio Kohler Research)
Augusto Gandia (Gramazio Kohler Research)
Description:
This workshop will introduce participants to the software package compas_fab, which facilitates the planning and execution of robotic fabrication processes. It provides interfaces to existing software libraries and tools available in the field of robotics (e.g. OMPL) and makes them accessible from within the parametric design environment. Read more >>
Pre-workshop 5

Instructors:
Sven Stumm (Individualized Production in Architecture RWTH Aachen University)
Johannes Braumann (Association for Robots in Architecture, UfG Linz)
Elisa Lublasser (Individualized Production in Architecture RWTH Aachen University)
Description:
In this workshop the Association for Robots in Architecture introduces the new KUKA|prc for Dynamo. Subsequently the chair for Individualized Production in Architecture of the RWTH Aachen University gives a first introduction to mobile robotics employing the KUKA KMR iiwa. The workshop… Read more >>
Full Workshops
Workshop 1

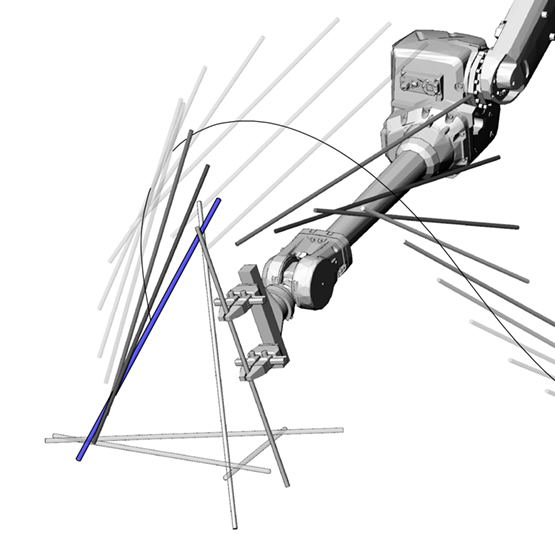
Chainsawed wood joinery
BOOKED OUT! CONTACT US FOR THE WAITING LIST
Instructors:
Achilleas Xydis (ETH Zurich)
Florian Fend (TU Graz)
Yuko Ishizu (Takenaka Corporation, Researcher)
Description:
The classic approach to design and manufacturing has been so far based on standardization and the efficient production of uniform and homogeneous artefacts and considers irregularities as flaws that need to be eliminated.
However, it is now possible to make use of natural materials with minimal impact on production efficiency, and thus … Read more >>
Workshop 2
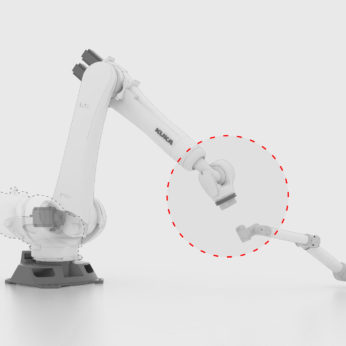
Cooperative robotic fabrication of spatial timber structures
BOOKED OUT! CONTACT US FOR THE WAITING LIST
Instructors:
Andreas Thoma (Gramazio Kohler Research)
Matthias Helmreich (Gramazio Kohler Research)
Matteo Pacher (Gramazio Kohler Research)
Aleksandra Anna Apolinarska (Gramazio Kohler Research)
Ammar Mirjan (Gramazio Kohler Research)
Description:
In this workshop, our aim is to join simple timber beams into highly informed and complex spatial structures that follow a specific constructive assembly logic. We will take advantage of the ability of cooperating robotic arms to position, orient and join timber elements, investigate different spatial arrangements and determine the solution space of what is physically buildable with the aid of robotic simulation… Read more >>
Workshop 3

Augmented Robotics: Mixed reality environments for on-demand fabrication, assembly and analysis of complex steel structures
BOOKED OUT! CONTACT US FOR THE WAITING LIST
Instructors:
Gwyllim Jahn (Fologram)
Cameron Newnham (Fologram)
Roland Snooks (RMIT University)
Description:
The workshop combines robotic fabrication with interactive holographic instructions for assembly. We will leverage this human-machine interaction to reduce the time, cost, risk and complexity of fabricating complex architectural assemblages by eliminating the traditional reliance on 2d documentation, jigs and setout for manual construction and the extensive requirements for robotic programming and computer vision systems… Read more >>
Workshop 4

Robo-Stim: Mixed Reality Robotic Stimulation for Collaborative Design Exploration
BOOKED OUT! CONTACT US FOR THE WAITING LIST
Instructors:
Ryan Luke Johns (GREYSHED)
Axel Kilian (Princeton University School of Architecture)
Jeffrey Anderson (Pratt Institute)
Description:
This workshop will engage a combination of virtual reality, augmented reality and robotics to produce immersive environments for collaborative design and fabrication. Through the calibrated coordination of local robot coordinate systems with those of immersive virtual reality rigs (HTC Vive), handheld augmented reality devices (mobile phones with ARKit & ARCore), and digitally projected content, we use robotics… Read more >>
Workshop 5

Large-scale non-standard robotic timber construction
BOOKED OUT! CONTACT US FOR THE WAITING LIST
Instructors:
Ralph Bärtschi (ROB Technologies)
Tobias Bonwetsch (ROB Technologies)
Thomas Wehrle (Erne AG Holzbau)
Description:
This workshop aims to demonstrate the synchronisation of advanced digital design with robotic manufacturing of large-scale timber constructions. We will work with the gantry robot of Erne Holzbau, Europe’s largest robotic setup for the manufacture of highly complex timber constructions, with processing dimensions of 48 x 6.1 x 1.9 m. The installation comprises seven axes and a flexible tool changing head allowing the use of various tools… Read more >>
Workshop 6

Sub-additive 3D printing of optimized double curved concrete lattice thin shell structures
BOOKED OUT! CONTACT US FOR THE WAITING LIST
Instructors:
Sasa Zivkovic (Cornell University)
Martin Fields Miller (Cornell University)
Christopher A. Battaglia (Ball State University)
Description:
This workshop investigates new means of architectural scale concrete 3D printing to fabricate robust doubly curved geometries and construct structurally optimized thin shell structures. Sub-Additive Manufacturing explores a three dimensional deposition of concrete printing material on a mechanically shaped substructure of reusable aggregate. Concrete material is extruded with a robotic arm using three dimensionally curved… Read more >>
Workshop 7

MARS 3.0 – Martian Autonomous Robotic Swarm
BOOKED OUT! CONTACT US FOR THE WAITING LIST
Instructors:
Josef Musil (Electronics and Algorithms, Foster + Partners)
Miriam Dall’Igna (Electronics and Algorithms, Foster + Partners – UoW, OU)
Xiaoming Yang (Electronics and Algorithms, Foster + Partners)
Reinier Zeldenrust (Electronics and Algorithms, Foster + Partners)
Octavian Gheorghiu (Media and Algorithms, Foster + Partners – UCL, AA)
Samuel Wilkinson (Additive Manufacturing and Algorithms, Foster + Partners)
Description:
MARS 3.0 will develop a goal oriented autonomous robotic system based on multiple agents. The final aim is to design or generate behavioural rules for a group of robots that would eventually lead to collective fabrication of a Martian habitat structure. This behaviour will be developed and tested both in virtual and physical simulation. Swarm intelligence is one of the main focuses of the workshop. Participants will explore the definition of rules… Read more >>
Workshop 8
Adaptive spatial 3D Printing of Mechano-Adaptive Space Frame Structures
BOOKED OUT! CONTACT US FOR THE WAITING LIST
Instructors:
Jan Dierckx (Foster + Partners)
Alessandro Felder (Royal Veterinary College)
Richard Maddock (Foster + Partners)
Giannis Nikas (Foster + Partners)
Description:
Mechano-Adaptive Space Frame Structures are inspired by the efficiency of bones, which utilise local responses to the mechanical environment to produce globally strong, yet lightweight structures. This strategy is very different from the way structures are designed and fabricated in traditional architecture and construction, where standardisation of components, nodes and geometry takes priority over material and structural efficiency… Read more >>
Workshop 9

Tight Squeeze: Automated Assembly of Spatial Structures in Constrained Sites
BOOKED OUT! CONTACT US FOR THE WAITING LIST
Instructors:
Shajay Bhooshan (ZHCODE)
Nathan King (Autodesk)
Jose Luis Garcia Del Castillo Lopez (Autodesk)
Hakim Hasan (Perkins & Will)
Leo Bieling (ZHOCDE)
With additional contributions from :
Gustav Fagerstrom (WPM)
Description:
As global population grows and urbanization continues, designers are increasingly asked to provide viable solutions for urban construction in sites with complicated boundary conditions, limited staging areas, and other imposed restrictions that would typically render the site untenable. In order to engage these sites new tools and techniques are needed. This workshop will explore the utilization of pre-existing reality capture data to inform the… Read more >>
Workshop 10

Clay++: 3D Printing on Arbitrary Surfaces
BOOKED OUT! CONTACT US FOR THE WAITING LIST
Instructors:
Dr. Negar Kalantar (Texas A&M University)
Dr. Dylan Shell (Texas A&M University)
Ana Anton (ETH Zurich)
Hyunchul Kwon (ETH Zurich)
Jibin Rajan Varghese (Texas A&M University)
William Palmer (Texas A&M University)
Description:
Clay++ will explore how any surface can form the substrate for deposition- and extrusion-based robotic fabrication. We will employ a workflow combining Rhino, RobotStudio, and the open-source ROS platform. Participants will use this workflow to design a pattern to be projected and then rendered in clay upon a curved surface. This setting will give a practical experience with media, as exemplified by clay, that are “live” in the sense that… Read more >>
Workshop 11

Instructors:
Florian Horsch (Shaper Tools Inc.)
Lukas Semmler (Resident KAOS Berlin)
Description:
This workshop will introduce participants to a novel power tool and invite them to explore new possibilities in terms of digital workflow, on-tool content creation and robotically assisted fabrication.
Shaper Origin is a hand-held cobotic router, which uses computer vision to locate itself precisely … Read more >>