

Pre-Workshop 1
Description
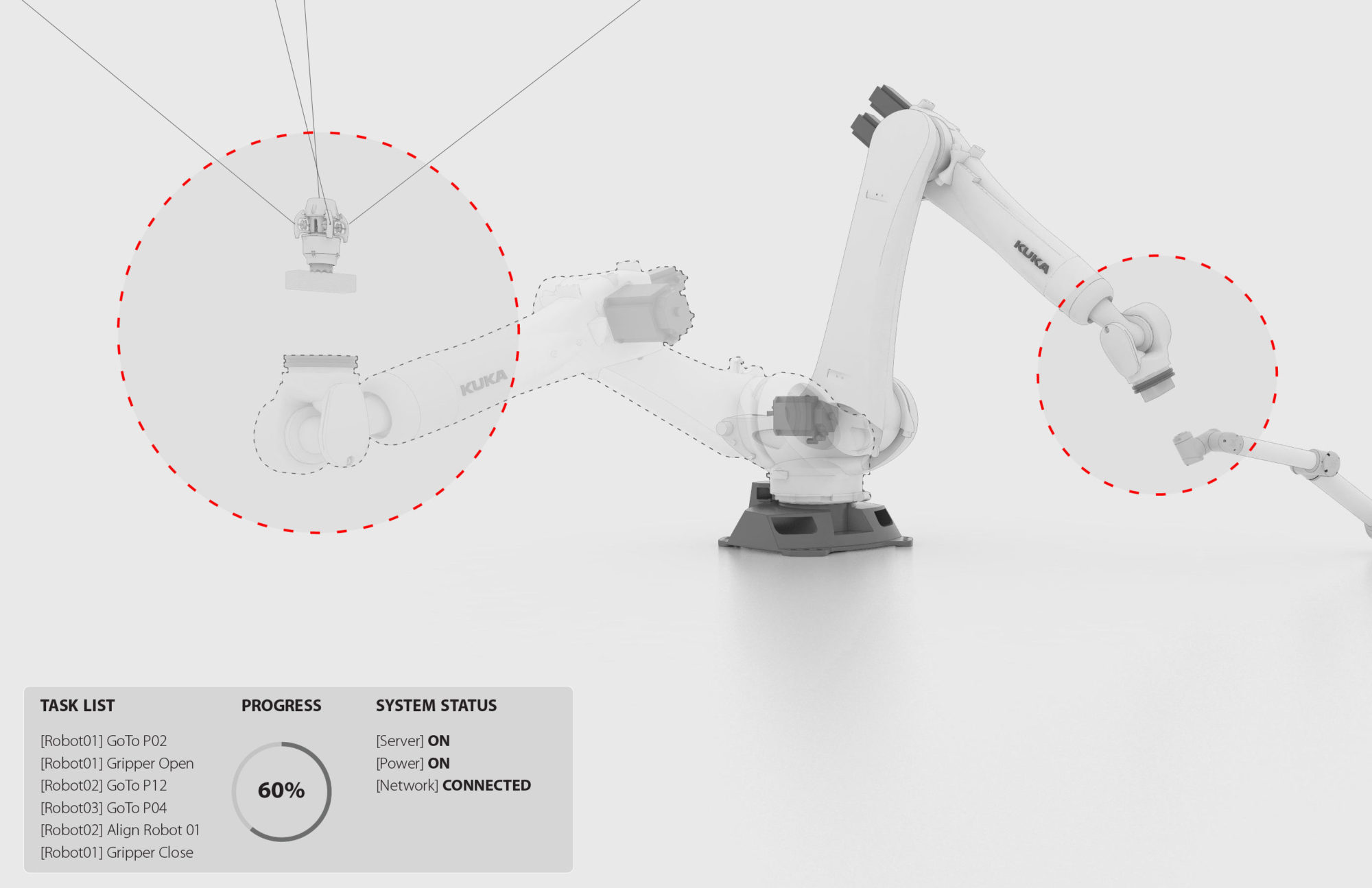
The general use of robots in the creative industry is rather limited to industrial robotic arms. Additionally, when it comes to collaboration between multiple types of robots, it becomes complicated and very quickly unorganized, especially when multiple robotic systems with different control interfaces have to be integrated. The idea of this pre-workshop is to introduce the participants to collaborative frameworks where different robotic types (industrial robotic arm, UAV, wheeled robots and cable driven robots etc.) are used, as well as the benefit/disadvantages of each solution and their impact on the design space/possibilities. Afterward, there will be a brief introduction to ROS as a central communication platform.
The instructors have taken part in this project collectively:
ICD/ITKE Research Pavilion 2016-2017
Instructors
Ayoub Lharchi (Centre for Information Technology and Architecture | KADK), Yen-Cheng Lu (FibR), Bahar Al Bahar (RoboCraft), Jingcheng Chen (Design-to-Production)
Learning goals
The participants will be introduced to multi-agents robotic fabrication, as well as some fundamental concepts of ROS (Robot Operating System). This will allow an understanding of individual agents’ morphospace and the combined space that can yield a set of designs. They will learn how to interface between ROS as a control system and Grasshopper+Rhinoceros as a design platform.
Requirements
- Knowledge of Rhino and Grasshopper
- Programming knowledge in Python
- Basic robotic knowledge (recommended)
- Knowledge of Linux (recommended)
Duration
1 day
Number of participants
20